

While some details of plans have been released previously, the bankable feasibility study and NI 43-101 Technical Report authored by Ausenco and just filed by Canada Nickel for its Crawford nickel-cobalt-chromium project in northern Ontario’s Timmins Nickel District with an effective date of October 1, 2023, provides much more detail on its planned use of trolley assist and autonomous drilling, including a stated intention to combine trolley assist with autonomous haulage.
Mark Selby, CEO of Canada Nickel, states: “Just four years ago, Crawford had only five drill holes. Today, we believe it is a world-class project with tremendous momentum. We are fully focused on pursuing our next milestones of obtaining permits, developing a financing package, and moving towards a production decision by mid-2025, with a goal of first production by the end of 2027.”
Crawford will employ conventional open pit mining techniques to mine 1,715 Mt ore and 3,992 Mt waste over a 33.5 year life, including 2.5 years of pre-stripping. Open pit mining operations at Crawford will be performed by a mixed fleet of mining equipment. Areas where the footwall is in clay will be mined with 120 t class backhoe excavators loading 40 t articulated trucks. Areas where the footwall is in sand and till will be mined with 300 t electric face shovels loading 90 t trucks. This will include clay contained in mixed clay/sand and till benches.
A bench height of 7.5 m will be employed to RL180 (approximately 90 m below the mean surface elevation), which is below the lowest horizon where overburden will be encountered. The 1,037 Mt of rock contained within these benches (63% of all 7.5 m bench material) will be mined predominantly with 700 t face shovels (Cat 6060 and Komatsu PC7000 cited). A lesser tonnage of rock will be loaded by 50 t payload front-end loaders (Komatsu WE1850) and 100 t payload rope shovels (Cat 7495 and Komatsu P&H 4100 cited). All three loading units will load 290 t trucks (the report cites the Caterpillar 794 or Komatsu 930E as examples) equipped with AHS and trolley assist.
The 4,047 Mt rock that will be mined below RL180 will be predominantly loaded by the rope shovels, supported by face shovels and front-end loaders. Over the life of mine, 2% of total rock will be loaded by front-end loaders, 30% by face shovels and the remaining 68% by rope shovels.
Peak production will be in year 11 when the 290 t fleet will total 56, loaded by three large rope shovels. Interestingly, to take full advantage of AHS haul trucks, which will not be delayed for operator delays, the 700 t face shovels and rope shovels will be operated tele-remotely. Additionally, an additional operator will be provided for each fleet per shift, to facilitate operator breaks. For example, at peak production there will be two 700 t face shovels and three rope shovels operational. These will be operated by a team of three face shovel operators and four shovel operators on each shift.
No drilling and blasting of overburden will be required. For pioneer operations on the initial bench of rock mining, small diesel powered and conventionally operated drills will be used to drill 127 mm blast holes. Below this initial bench, larger electrically powered units equipped with an autonomous drilling system (ADS) will be used for drilling 229 mm blast holes on 7.5 m benches and 271 mm blast holes on 15 m benches. Final walls will be pre-split. Pre- split holes will be drilled using the same machine as for pioneering.
Production equipment will be supported by various units of support equipment, including tracked dozers, wheel dozers, front-end loaders, graders, water tankers and utility excavators. A mining contractor will be used to expedite the start-up, with particular focus on sourcing aggregate from off-site and establishing the initial benches in clay. Thereafter, all mining fleet will be owner-operated.
Surface haul roads for the 290 t class trucks will be 35 m wide. Where trolley assist is used on in-pit ramps, the width will be 50 m, which allows for trolley infrastructure and an extra lane to pass any vehicle (including service vehicles) that may be stopped under the trolley line. Other roads will measure 15 m wide.
Electrical demand in the pit will peak at 70 MW (operating load) in year 13 and average 30 MW over the life of mine. The main customer will be the trolley assist system, consuming 62% of the total kilowatt-hours. The in-pit dewatering system will consume a further 9%, while workshops and the blasting plant require 1%. The remaining 28% will be consumed by mobile electric equipment, including blast hole drills, face shovels, and rope shovels. Extending power to the various units of electric equipment will require a network of overhead lines that progressively extends, with a total of 68.7 km installed over the life of mine. This total includes 19.0 km of lines that will have been previously removed and reinstalled. Mobile electrical equipment (shovels and drills) and pumps will be supplied from mobile substations that are mounted on skids or wheels and can be towed by a wheel dozer.
Canada Nickel retained the technology consultant Peck Tech to assist with the design and implementation of autonomous drilling systems (ADS) and autonomous haulage systems (AHS). It also retained the global technology company ABB to assist with the design and implementation of trolley-assisted truck haulage. It says collectively, these technologies will achieve a reduction in the unit mining operating cost of 26%, with attendant impact on the economic limits of open pit mining; plus a reduction in the open pit labour component of 33%. The jobs being eliminated are lower skilled equipment operator positions that peer operations are having difficulty filling. These positions will be partially replaced by higher skilled positions associated with the implementation and maintenance of technology.
At Crawford, ADS machines would be supervised remotely in an office control room, or locally (ie in the pit) via a tablet. The nominal span of control will be one supervisor for every three operating ADS units. The report estimates that there are approximately 100 ADS equipped machines operating globally, with 80% supplied by Epiroc. Epiroc’s PV271 is cited as a blasthole drill option along with the Sandvik DR412i.
As at other autonomous haulage mines, at Crawford, AHS machines would be supervised by a team of engineers, technicians, coders, ‘runners’ (who monitor the status of equipment in the pit), and dispatchers. As some positions require a fixed number of personnel, irrespective of the number of operational units, and other positions require additional personnel if the total fleet exceeds a certain number, the overall span of control varies. For Crawford’s mine plan, the life of mine average is seven trucks per person, per shift.
With the energy prices that have been forecast for Crawford, the energy savings through use of trolley is estimated at C$31/km travelled. Productivity savings result from the increased speed of haul trucks traveling uphill on trolley. For the class of truck planned at Crawford, a doubling of speed on trolley is possible. This would lead to an overall reduction in average cycle time over the life of mine of 14%. This allows the mine plan to be achieved with fewer trucks, with the additional benefit of reducing congestion associated with ‘bunching’ of units. Maintenance wise, with the lower diesel consumption rate for a truck travelling on trolley, the interval between overhauls and replacements can be extended.
In addition to the cost benefits listed above, trolley assist also has significantly environmental benefits, resulting from the reduction in particulate matter and greenhouse gases associated with generating energy from hydrocarbons. In the event trolley assist were not used at Crawford, diesel consumption by the fleet of 290 t trucks would approximately double leading to a 53% increase in CO2 emissions.
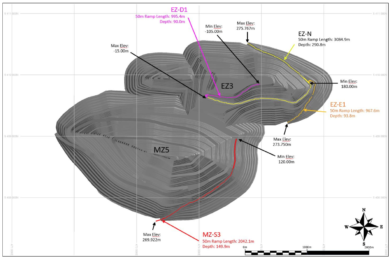
Eight of the ten mining stages would include trolley-assist infrastructure, with just the small East Zone starter phases EZ1 and EZ2 not having sufficient travel on the ramps to justify the technology. Trolley assist will also be provided to each of the stockpiles and to the waste rock impoundment.
The report adds: “A key assumption in the design, based on operating experience at Palabora and Sishen, is that steady-state utilization of each trolley equipped ramp (measured in percentage of potential tonnes x equipped kilometres) would be 90%. It was also assumed each new in-pit segment would take 18 months to reach this utilisation, with a key constraint being the time required to open a bench sufficiently that fly rock from blasting would not damage the system. For the dump, where no blasting would take place, the time required to reach steady-state was assumed to be 12 months. Over the life of mine, 73% of total uphill tonnes x kilometres travelled by the 290 t trucks would be on trolley-assist. The smaller 90 t and articulated trucks will not be equipped for trolley assist.”